








O zakładzie

W swojej pracy dydaktycznej i badawczej zespół pracowników zakładu od wielu lat zajmuje się tematyką związaną ze sterowaniem i konstruowaniem robotów (przemysłowych, społecznych, ratunkowych i medycznych), oraz zastosowaniem technologii sztucznej inteligencji (AI).
Główne kierunki badań naukowych prowadzonych w Zakładzie Sterowania Robotów to:
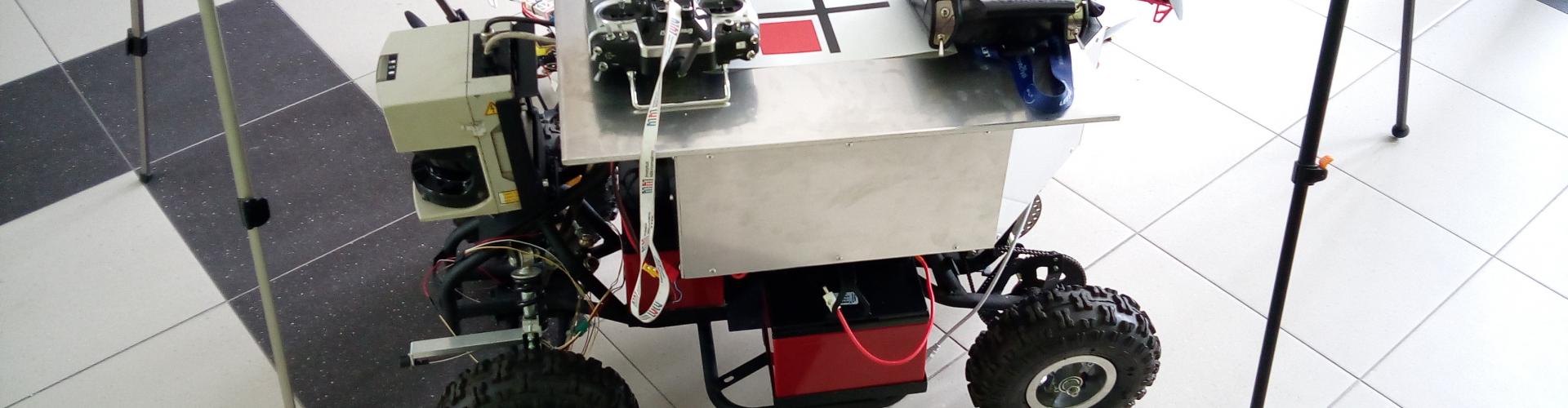
- konstrukcja i sterowanie robotów mobilnych oraz robotów do zastosowań specjalnych,
- sterowanie elektrycznych i pneumatycznych napędów robotów,
- wykorzystanie informacji wizyjnej w sterowaniu robotów,
- zaawansowane sterowanie obiektów nieliniowych,
- systemy teleoperacyjne i sterowanie przez sieć,
- sterowanie impedancyjne.,
- interakcja człowiek-robot.
W ramach prac badawczych w ostatnim czasie wykonano następujące projekty:
- Opracowanie i budowa Autonomicznych Robotów Mobilnych (AMR) do transportu wewnątrzzakładowego, zintegrowanych z modularnym systemem uniwersalnych stanowisk zrobotyzowanych – SMART.
- Sterowanie impedancyjne dla robotów ratunkowych - ROBREX.
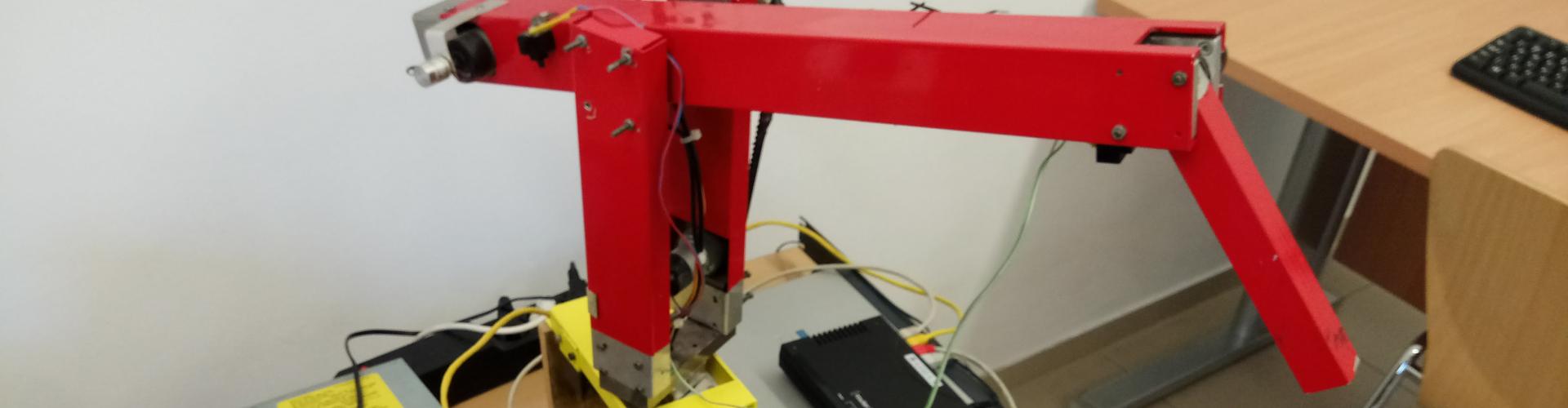
- Stworzenie systemu urządzeń i środowiska programistycznego do wspomagania terapii sensorycznej dzieci ze spektrum Autyzmu – Roboterapia. Innowacyjne urządzenia nie tylko pozwalają personalizować i monitorować terapię ale także odciążają terapeutę i mogą uczynić jego pracę przyjemniejszą.
- Rozwój urządzeń wspierających terapię osób po udarze – projekt we współpracy z Nagoya Institute of Technology oraz szpitalem im. dr Jonschera w Łodzi.
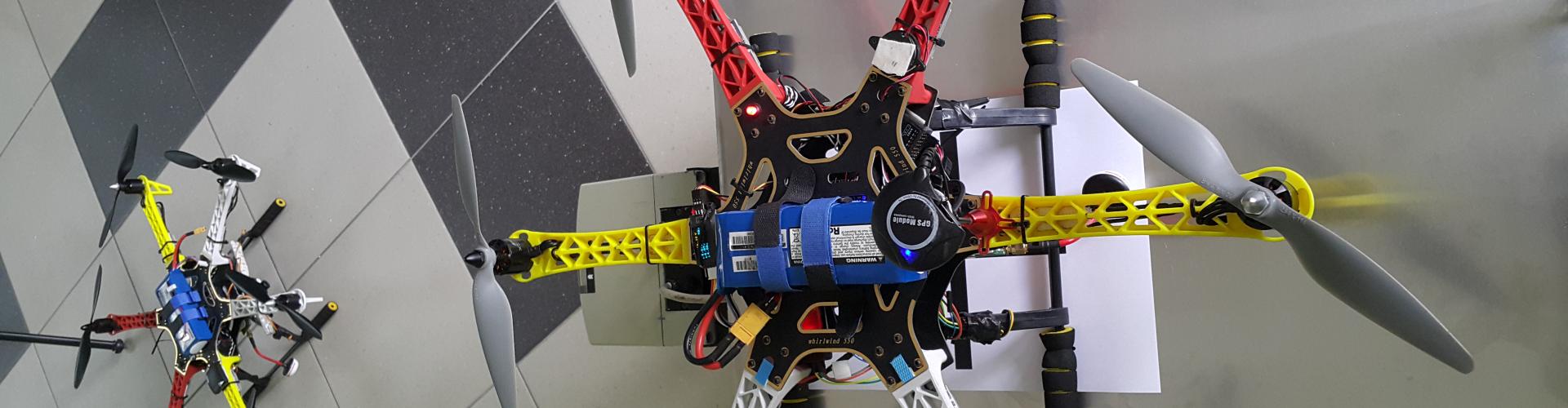
- Budowa robotów modułowych (lądowych i latających) do inspekcji i akcji poszukiwawczo-ratunkowych – Raptors, Najlepsi z najlepszych.
Zakład Sterowania Robotów specjalizuje się w zajęciach z zakresu podstaw robotyki, sterowania robotów, robotów mobilnych, automatyki przemysłowej oraz systemów wizyjnych w robotyce i systemów autonomicznych.
Istnieje możliwość rozwijania zainteresowań w ramach Studenckiego Koła Naukowego Robotyki SKaNeR, gdzie realizowane są projekty, które często pokazywane są na międzynarodowych wystawach i nagradzane w ramach różnych konkursów. Studenci od 2008 roku organizują jedne z największych w Polsce – międzynarodowe zawody robotów Sumo Challenge.